Multiple Choice
A gyroscopic wheel spins clockwise as shown. The set of vectors that correctly describes the directions of the torque  , angular momentum
, angular momentum  , and angular velocity of precession
, and angular velocity of precession  p, is
p, is 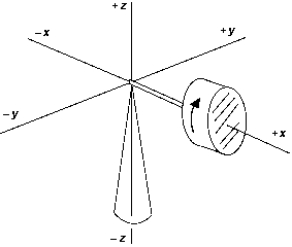
A)  (+z) ;
(+z) ;  (-x) ;
(-x) ;  (+y)
(+y)
B)  (-z) ;
(-z) ;  (+x) ;
(+x) ;  (-y)
(-y)
C)  (+y) ;
(+y) ;  (-x) ;
(-x) ;  (+z)
(+z)
D)  (-y) ;
(-y) ;  (-z) ;
(-z) ;  (-x)
(-x)
E)  (+y) ;
(+y) ;  (-x) ;
(-x) ;  (-z)
(-z)
Correct Answer:

Verified
Correct Answer:
Verified
Q9: A disc rotates clockwise in the plane
Q28: A wheel of moment of inertia 0.136
Q34: A disc-shaped grindstone of mass 3.0
Q38: A spinning bicycle wheel with a loaded
Q40: If the sum of the external torques
Q52: The angular momentum vector for a spinning
Q59: The energy-level diagram that most closely represents
Q62: Vectors <img src="https://d2lvgg3v3hfg70.cloudfront.net/TB6080/.jpg" alt=" Vectors
Q65: If the sum of the external torques
Q66: A hoop rotates about an axis through